Event6D: Event-based Novel Object 6D Pose Tracking
Event6D is an event-based framework for real-time novel object 6D pose tracking that reconstructs intensity and depth from event streams and introduces a benchmark with synthetic …
Jae-Young Kang*
Event6D is an event-based framework for real-time novel object 6D pose tracking that reconstructs intensity and depth from event streams and introduces a benchmark with synthetic …
DSERT-RoLL is a multimodal driving dataset featuring stereo event, RGB, and thermal cameras together with 4D radar and dual LiDAR, providing unified 2D and 3D detection benchmarks …

An end-to-end autonomous driving framework that achieves viewpoint robustness by jointly learning feed-forward 3D Gaussian splatting for planning-aware view synthesis.
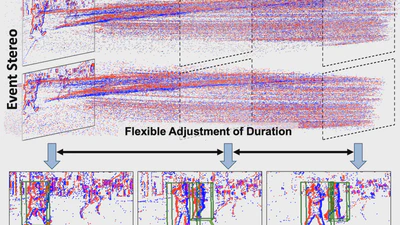
A continuous-time 3D object detection framework that relies solely on stereo event cameras, exploiting their high temporal resolution with dual filters and object-centric …
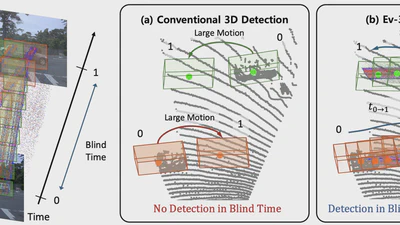
Event-based 3D object detection leveraging asynchronous event cameras to overcome blind times in autonomous driving.
Space-time video super-resolution using event cameras to jointly align low- and high-resolution information.
Event-based stereo matching method that jointly learns temporal and stereoscopic flow.