HEAT: Heterogeneous End-to-End Autonomous Driving via Trajectory-Guided World Models
May 19, 2026·
,,
Hoonhee Cho*
Equal contribution
,Giwon Lee*
Equal contribution
,Jae-Young Kang*
Equal contribution
,Hyemin Yang
Heejun Park
Kuk-Jin Yoon
Corresponding Author
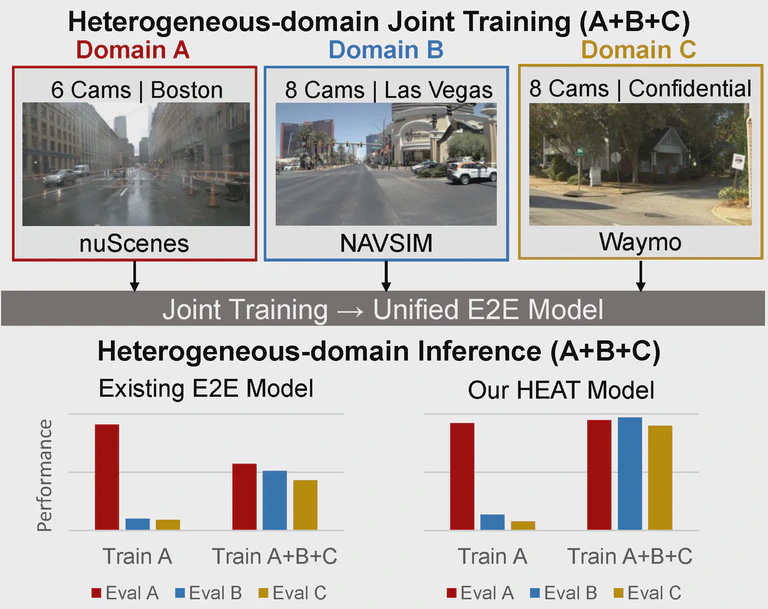
HEAT is a trajectory-driven learning framework for end-to-end autonomous driving across heterogeneous domains. A world model couples visual and action latents through ground-truth trajectories to learn domain-agnostic, behavior-aligned representations, which are clustered into trajectory-guided prototypes and episodic memory used to train the E2E-AD model via contrastive learning. The method is evaluated on nuScenes, NAVSIM, and Waymo, achieving state-of-the-art performance in both open-loop planning and closed-loop simulation without domain-specific retraining.