Publications
Event6D: Event-based Novel Object 6D Pose Tracking
Jae-Young Kang*, Hoonhee Cho*, Taeyeop Lee*, Minjun Kang, Bowen Wen, Youngho Kim, Kuk-Jin Yoon
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
Hoonhee Cho*, Jae-Young Kang*, Yuhwan Jeong*, Yunseo Yang, Wonyoung Lee, Youngho Kim, Kuk-Jin Yoon
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
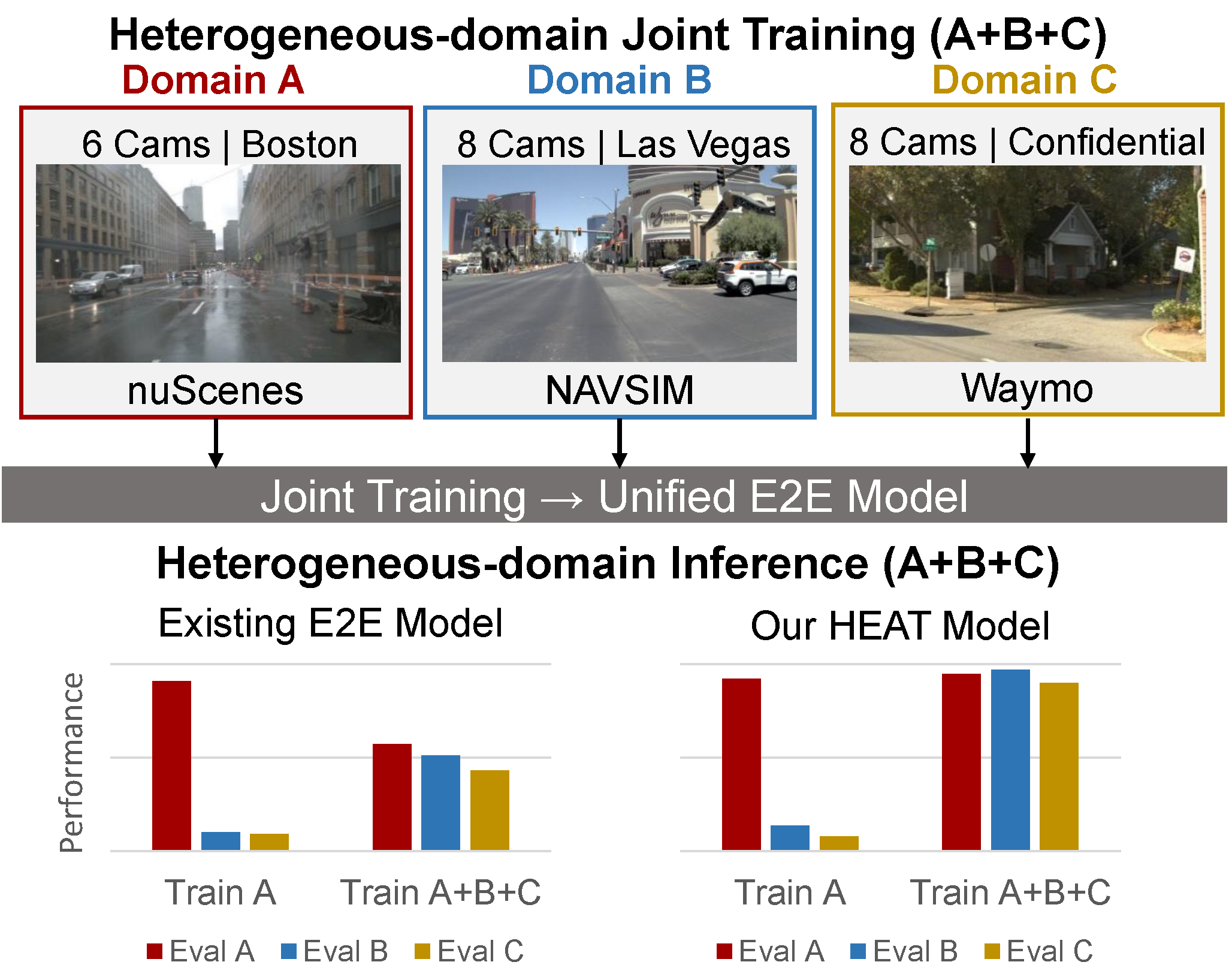
HEAT: Heterogeneous End-to-End Autonomous Driving via Trajectory-Guided World Models
Hoonhee Cho*, Giwon Lee*, Jae-Young Kang*, Hyemin Yang, Heejun Park, Kuk-Jin Yoon
arXiv preprint arXiv:2605.19631
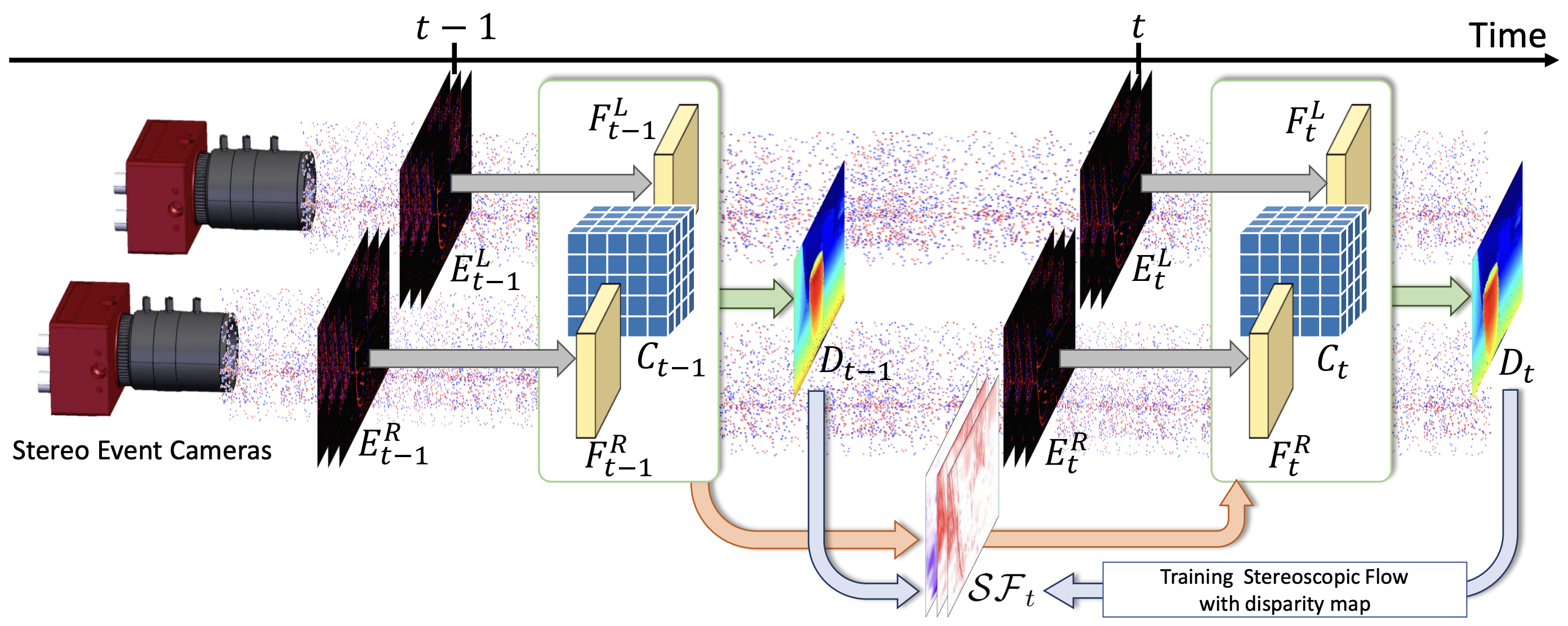
Temporal Stereo Matching From Event Cameras Via Joint Learning With Stereoscopic Flow
Jae-Young Kang*, Hoonhee Cho*, Kuk-Jin Yoon
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2025
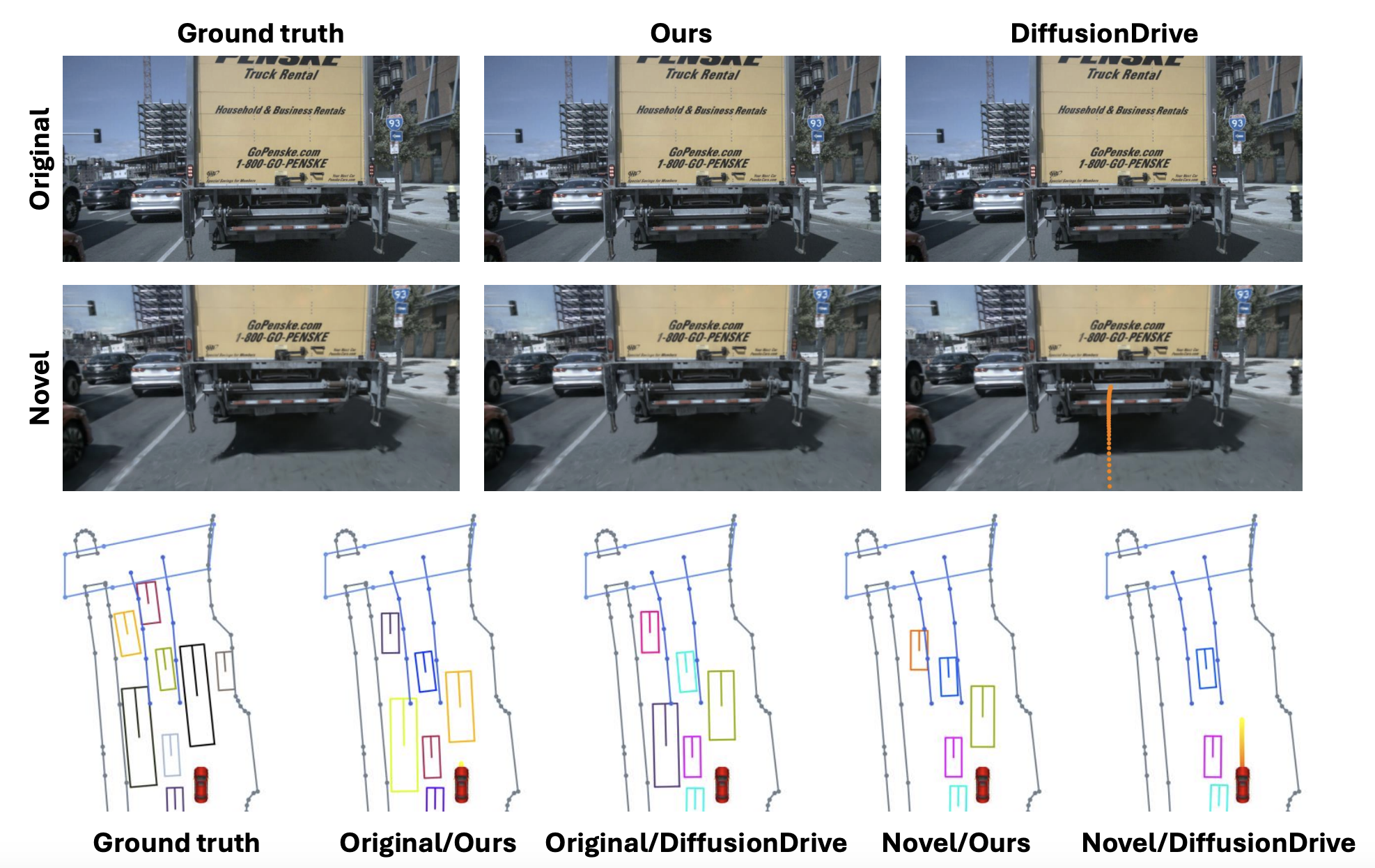
VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian Splatting
Hoonhee Cho*, Jae-Young Kang*, Giwon Lee*, Hyemin Yang*, Heejun Park, Seokwoo Jung, Kuk-Jin Yoon
Conference on Neural Information Processing Systems (NeurIPS) 2025
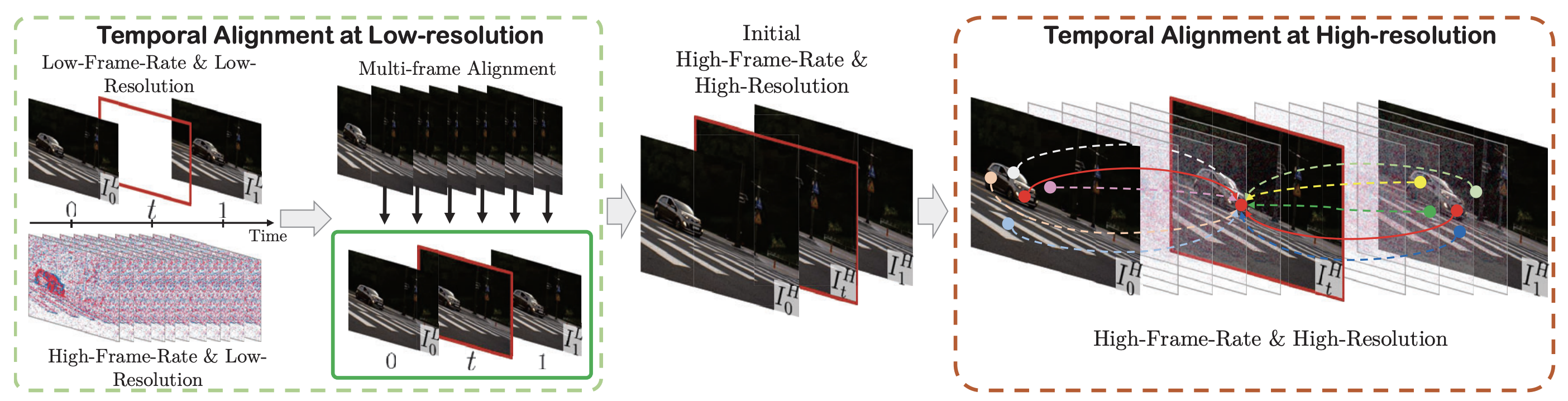
Unleashing the Temporal Potential of Stereo Event Cameras for Continuous-Time 3D Object Detection
Jae-Young Kang*, Hoonhee Cho*, Kuk-Jin Yoon
IEEE/CVF International Conference on Computer Vision (ICCV) 2025
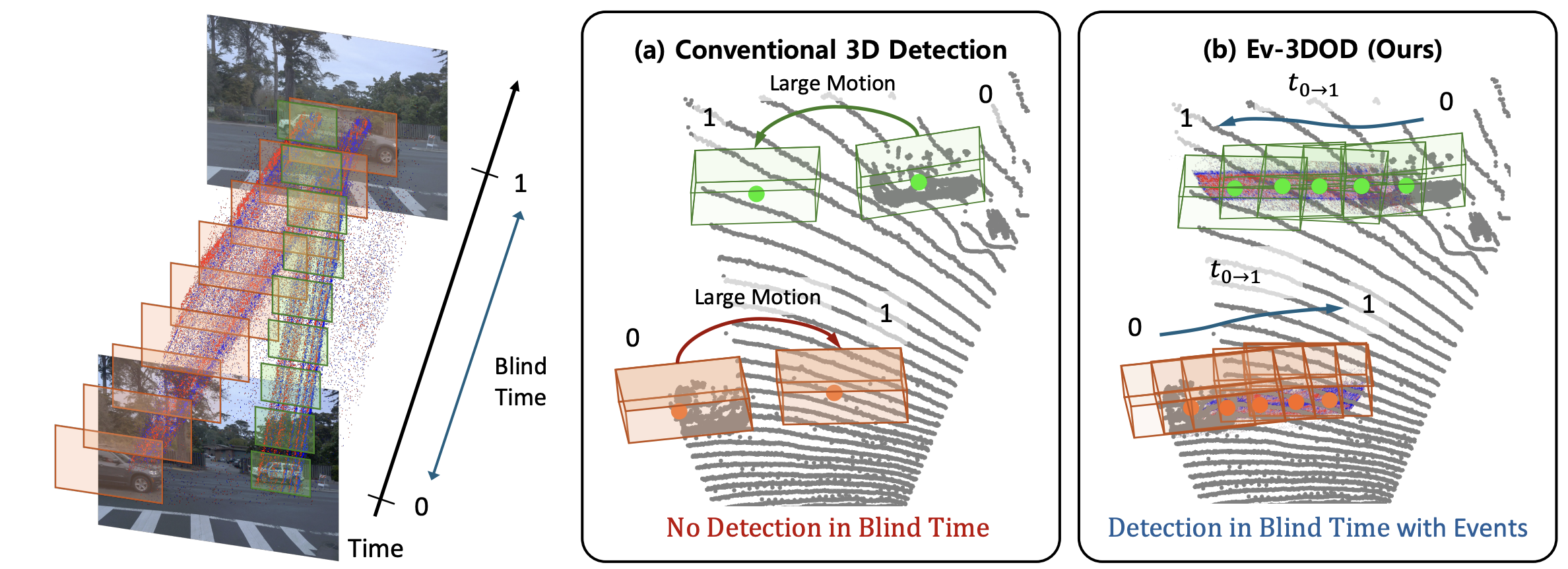
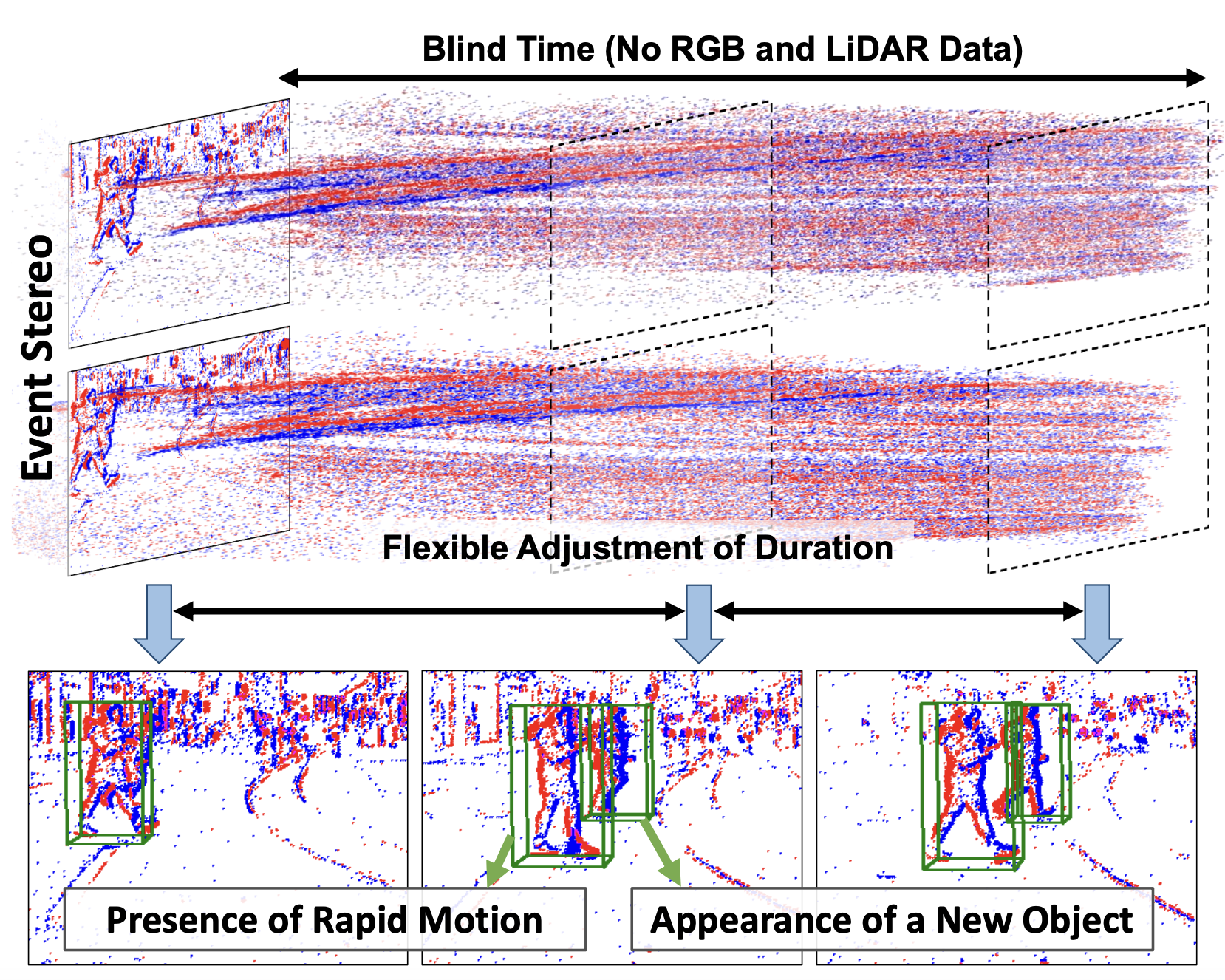
Ev-3DOD: Pushing the Temporal Boundaries of 3D Object Detection with Event Cameras
Hoonhee Cho*, Jae-Young Kang*, Youngho Kim, Kuk-Jin Yoon
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2025, Highlight (3.0%)
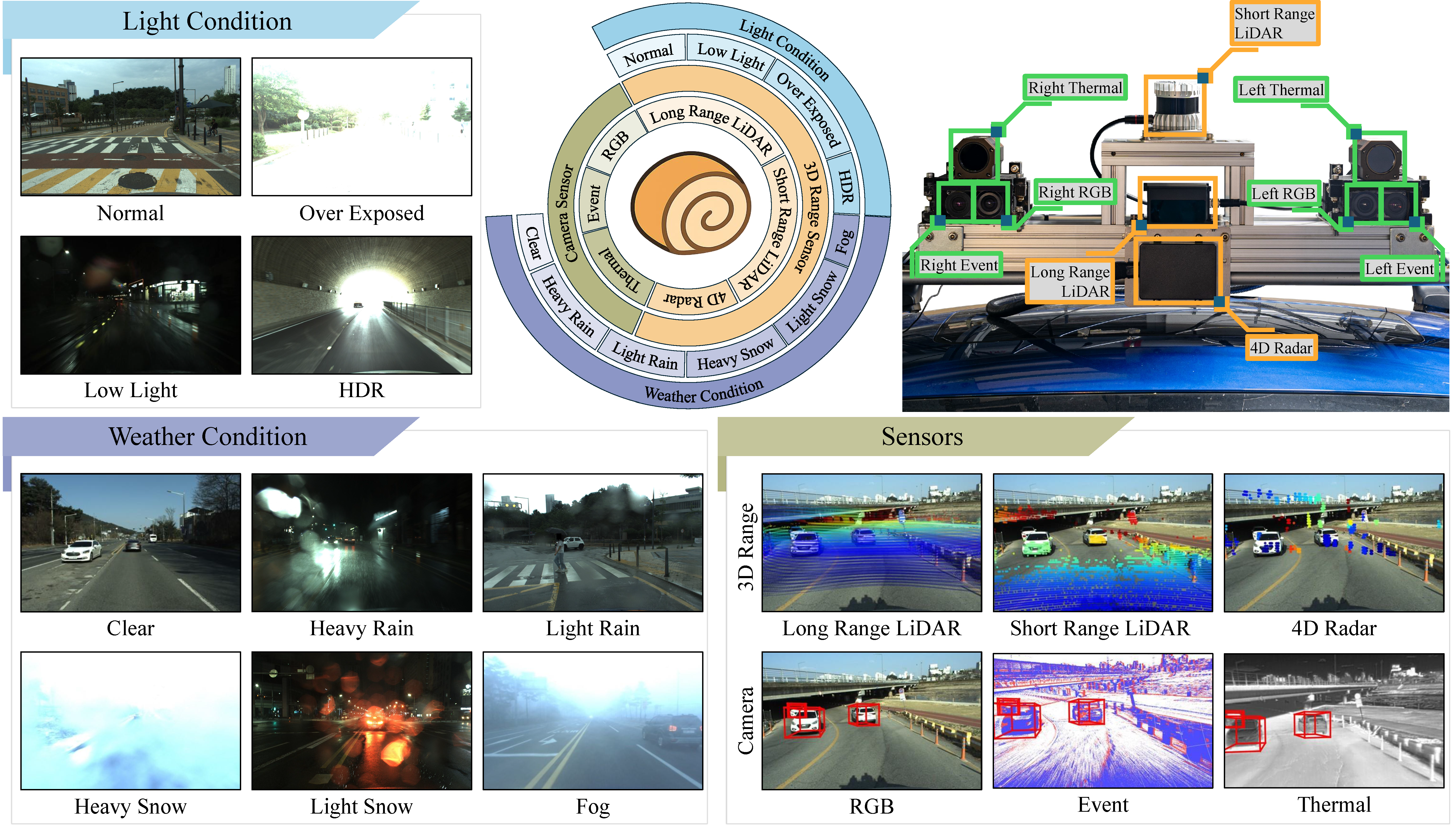
Hoonhee Cho, Jae-Young Kang, Taewoo Kim, Yuhwan Jeong, Kuk-Jin Yoon
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) 2025
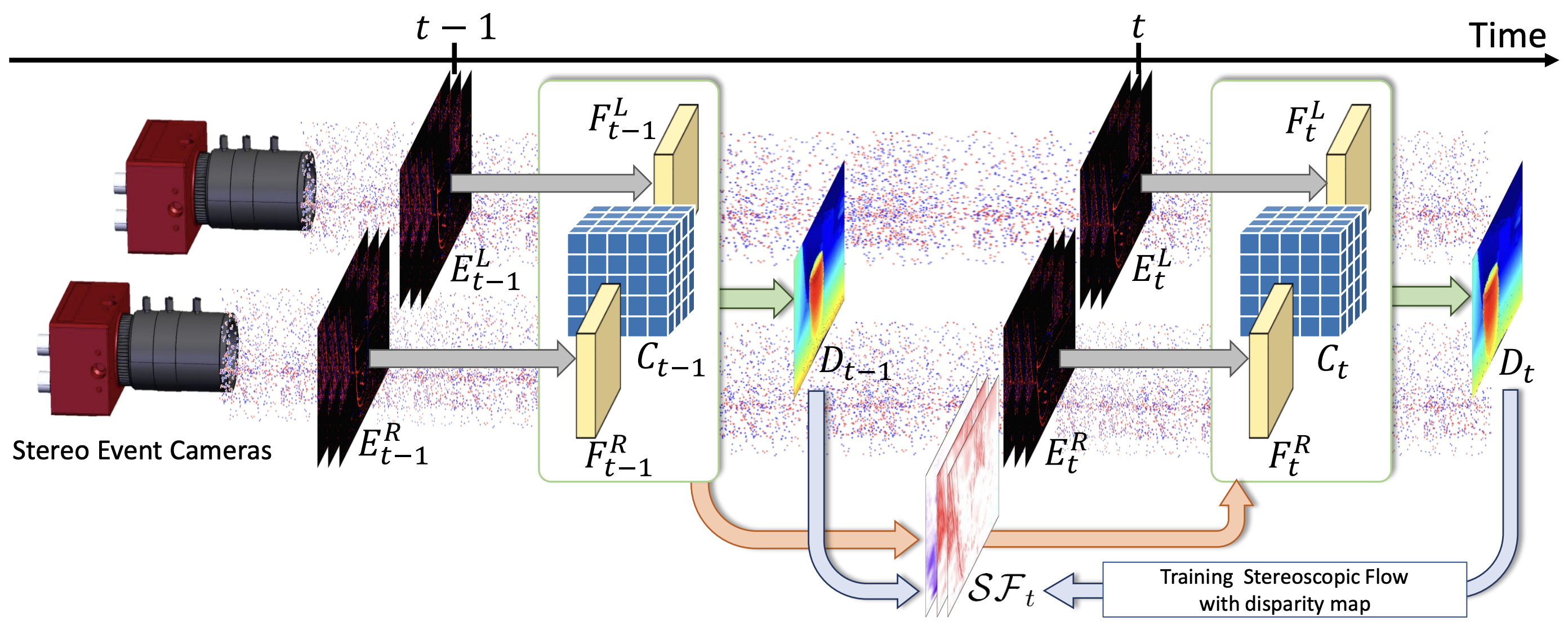
Temporal Event Stereo via Joint Learning with Stereoscopic Flow
Hoonhee Cho*, Jae-Young Kang*, Kuk-Jin Yoon
European Conference on Computer Vision (ECCV) 2024