Professional Summary
Research Interests
- Autonomous Driving
- End-to-end Autonomous Driving
- Multimodal Fusion
- Stereo Matching, Object Detection
- Event Camera
- Application of Event Camera for Various Tasks
Experience
I am currently pursuing my Ph.D. at Korea Advanced Institute of Science and Technology (KAIST) under the supervision of Professor Kuk-Jin Yoon.
- 2025.03 – Present · Ph.D. student, Mechanical Engineering, KAIST
- 2023.09 – 2025.02 · M.S., Mechanical Engineering, KAIST
- 2019.03 – 2023.08 · B.S., Mechanical Engineering, KAIST
Recent Publications
Event6D: Event-based Novel Object 6D Pose Tracking
Jae-Young Kang*, Hoonhee Cho*, Taeyeop Lee*, Minjun Kang, Bowen Wen, Youngho Kim, Kuk-Jin Yoon
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
Hoonhee Cho*, Jae-Young Kang*, Yuhwan Jeong*, Yunseo Yang, Wonyoung Lee, Youngho Kim, Kuk-Jin Yoon
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
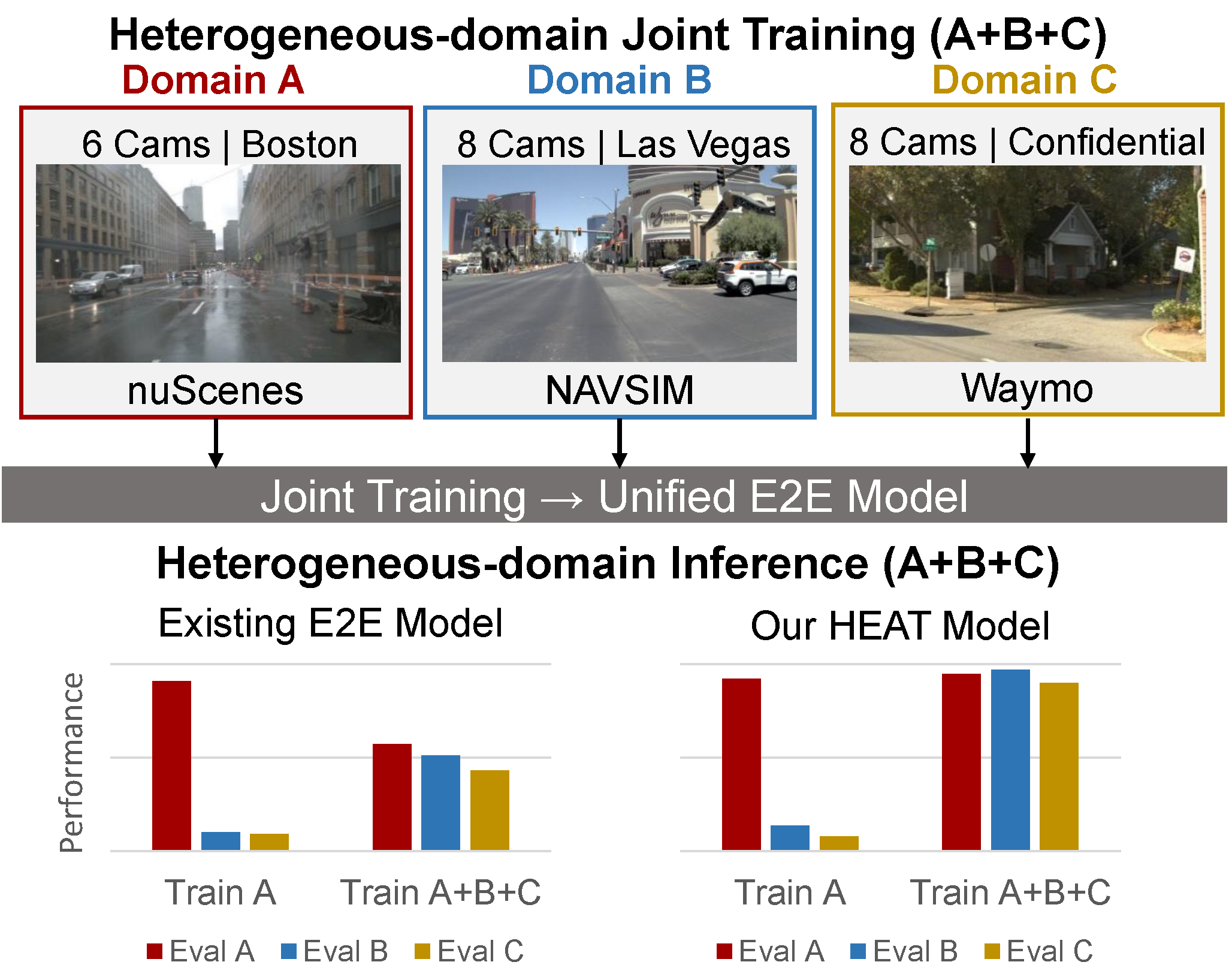
HEAT: Heterogeneous End-to-End Autonomous Driving via Trajectory-Guided World Models
Hoonhee Cho*, Giwon Lee*, Jae-Young Kang*, Hyemin Yang, Heejun Park, Kuk-Jin Yoon
arXiv preprint arXiv:2605.19631
All Publications
(2026).
Event6D: Event-based Novel Object 6D Pose Tracking.
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026.
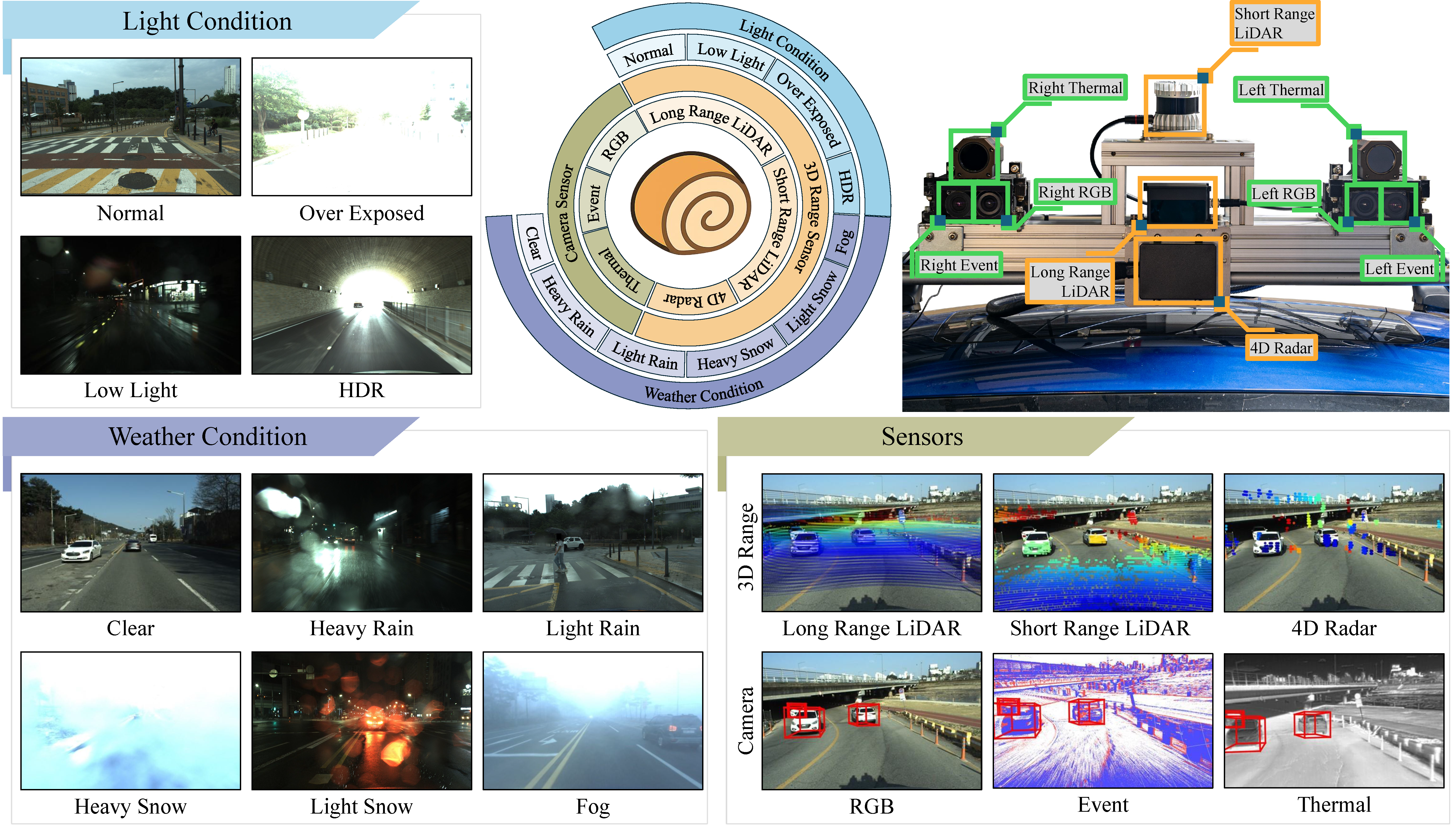
(2026).
DSERT-RoLL: Robust Multi-Modal Perception for Diverse Driving Conditions with Stereo Event-RGB-Thermal Cameras, 4D Radar, and Dual-LiDAR.
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026.
(2026).
HEAT: Heterogeneous End-to-End Autonomous Driving via Trajectory-Guided World Models.
arXiv preprint arXiv:2605.19631.
(2025).
Temporal Stereo Matching From Event Cameras Via Joint Learning With Stereoscopic Flow.
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2025.
(2025).
VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian Splatting.
Conference on Neural Information Processing Systems (NeurIPS) 2025.
(2025).
Unleashing the Temporal Potential of Stereo Event Cameras for Continuous-Time 3D Object Detection.
IEEE/CVF International Conference on Computer Vision (ICCV) 2025.
(2025).
Ev-3DOD: Pushing the Temporal Boundaries of 3D Object Detection with Event Cameras.
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2025, Highlight (3.0%).
(2025).
Unifying Low-Resolution and High-Resolution Alignment by Event Cameras for Space-Time Video Super-Resolution.
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) 2025.
(2024).
Temporal Event Stereo via Joint Learning with Stereoscopic Flow.
European Conference on Computer Vision (ECCV) 2024.
📚 Academic Service
I have been serving the research community as a reviewer for:
- 2026 · IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
- 2026 · European Conference on Computer Vision (ECCV)
- IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)
- IEEE Transactions on Image Processing (TIP)
🏅 Honors & News
- Qualcomm Innovation Fellowship Korea (QIFK) Finalist, 2025
Selected as a finalist for innovative PhD-level research proposals by Qualcomm - CVPR Highlight (Top 3%), 2025
Ev-3DOD recognized as a Highlight paper at CVPR 2025